
Resumen generado por IA
La inteligencia artificial (IA) está avanzando desde el procesamiento en la nube hacia la interacción directa con el mundo físico mediante robots autónomos que aprenden y se adaptan a su entorno. En el reciente Future Trends Forum de la Fundación Innovación Bankinter, expertos como Dario Floreano, pionero en robótica bioinspirada, destacaron la importancia del aprendizaje por refuerzo y el uso de simuladores avanzados que permiten entrenar robots en entornos virtuales realistas. Esta metodología reduce costos y riesgos, facilitando que robots como drones o cuadrúpedos mejoren su autonomía y eficiencia antes de enfrentar situaciones reales.
Floreano subraya que la robótica bioinspirada, que imita estructuras y comportamientos naturales, supera las limitaciones de los modelos matemáticos tradicionales. Su laboratorio desarrolla drones con alas flexibles y robots blandos que se adaptan a terrenos irregulares, logrando mayor precisión y eficiencia energética. Además, los simuladores no solo entrenan robots, sino que optimizan su diseño físico, abriendo la posibilidad de que estos evolucionen autónomamente, encontrando nuevas formas de locomoción y manipulación.
Aunque se ha avanzado en modelos de IA que generan comandos para robots, como los Vision-Language-Action Models, la creación de habilidades nuevas sigue siendo un reto. Floreano considera improbable un «RobotGPT» universal; más bien, cada robot tendrá IA especializada. El verdadero desafío es desarrollar sistemas que aprendan autónomamente en el mundo físico, combinando simulación y experimentación real para superar la complejidad dinámica del entorno.
La inteligencia artificial ya no se queda en la nube. Dario Floreano explora el futuro de la IA física, los robots bioinspirados y los desafíos para alcanzar la autonomía robótica
La inteligencia artificial está evolucionando más allá del procesamiento de datos en la nube. Ahora, se adentra en el mundo físico a través de robots autónomos que aprenden y se adaptan al entorno. Esta transición es el foco de la última edición del Future Trends Forum (FTF) de la Fundación Innovación Bankinter, donde expertos internacionales han analizado los retos y oportunidades de la IA física (Embodied AI). Uno de los participantes clave en este debate ha sido Dario Floreano, Catedrático y Director del Laboratorio de Sistemas Inteligentes de la EPFL y pionero en el desarrollo de robots bioinspirados.
De la simulación a la realidad: la IA en cuerpos físicos
Floreano destaca que muchos sistemas de IA actuales dependen de modelos pre entrenados en la nube y se basan en secuencias de comandos preprogramadas, lo que limita su capacidad de adaptación. Para alcanzar una verdadera inteligencia robótica, estos sistemas necesitan aprender del entorno, interactuando mediante prueba y error.
Este enfoque no es nuevo. El aprendizaje por refuerzo se ha utilizado en robótica durante más de tres décadas, pero el avance clave en los últimos años ha sido la aparición de grandes simuladores. Ahora, es posible entrenar robots en entornos virtuales realistas antes de desplegarlos en el mundo físico.
Simulación: el nuevo laboratorio de la IA física
Uno de los retos tradicionales en robótica ha sido el coste y la complejidad de entrenar modelos en entornos físicos. Un robot que se mueve en el mundo real se enfrenta a múltiples desafíos: terrenos inestables, obstáculos inesperados o variaciones climáticas. Experimentar en estos entornos puede ser lento, caro e incluso peligroso. Aquí es donde entran en juego los simuladores avanzados.
Estos entornos digitales permiten que un robot practique millones de veces en un entorno controlado antes de enfrentarse a situaciones reales. Floreano menciona que su colega Marco Hutter, del ETH Zurich, ha desarrollado simuladores que permiten a los robots aprender tareas complejas en paralelo, logrando mejoras significativas en eficiencia y autonomía.
Ejemplos recientes han demostrado la efectividad de este enfoque. En el campo de los drones autónomos, los entrenados en simuladores han alcanzado un nivel de destreza tal que ya superan a pilotos humanos en competiciones de carreras. Estos avances han sido posibles gracias a técnicas de transferencia de aprendizaje, donde un modelo entrenado en un entorno virtual puede trasladar su conocimiento al mundo real sin necesidad de ajustes manuales extensivos.
Además, el uso de simuladores también ha impulsado avances en la robótica cuadrúpeda, como los robots que caminan y corren por terrenos difíciles sin necesidad de intervención humana. Empresas como Boston Dynamics han perfeccionado este enfoque, logrando que su robot Spot pueda moverse con fluidez en entornos industriales o de rescate sin depender de programaciones rígidas.
Más allá del entrenamiento: simuladores para la optimización robótica
Floreano también subraya que los simuladores no solo sirven para entrenar robots, sino también para optimizar su diseño físico. En lugar de construir prototipos costosos, los investigadores pueden probar distintas configuraciones en entornos virtuales, ajustando parámetros como la estabilidad, el consumo energético o la capacidad de reacción ante imprevistos.
Esto abre la puerta a un futuro donde los robots no sean diseñados manualmente, sino que evolucionen a través de ciclos de prueba en simuladores, encontrando las estructuras más eficientes para cada tarea. ¿Podría un algoritmo descubrir nuevas formas de locomoción que aún no hemos imaginado? Floreano cree que estamos cada vez más cerca de esa posibilidad.
Robots bioinspirados: la naturaleza como modelo
Uno de los campos donde Dario Floreano destaca a nivel mundial es en el desarrollo de robots bioinspirados, sistemas que replican el comportamiento y la estructura de organismos vivos para mejorar su eficiencia en el mundo físico. Su enfoque se basa en una observación clave: los modelos matemáticos actuales no pueden predecir completamente ciertos movimientos naturales, como el vuelo de los pájaros o la locomoción de los insectos. La solución, en su opinión, está en construir mejores cuerpos robóticos que imiten la naturaleza.
Más allá de los modelos matemáticos: aprender de la biología
Floreano destaca que, aunque la biomecánica y la aerodinámica han avanzado mucho, aún no comprendemos del todo cómo ciertos organismos interactúan con su entorno. Por ejemplo, los drones convencionales están diseñados con alas y hélices fijas, pero los pájaros y murciélagos utilizan una combinación de alas flexibles y movimientos coordinados que les permiten maniobrar con gran precisión en espacios reducidos.
Para entender mejor estas dinámicas, los investigadores de su laboratorio han recurrido a un método innovador: construir robots que imiten estas estructuras y exponerlos a condiciones del mundo real. En lugar de depender exclusivamente de simulaciones, prueban prototipos en túneles de viento o en entornos naturales para observar cómo interactúan con el aire y optimizar su diseño.
Ejemplos de robots bioinspirados en acción
El laboratorio de Floreano ha desarrollado varias soluciones robóticas que siguen este principio. Algunos ejemplos incluyen:
- Drones con alas flexibles: a diferencia de los cuadricópteros tradicionales, estos drones ajustan la posición y forma de sus alas en tiempo real, mejorando su estabilidad en condiciones de viento fuerte.
- Robots blandos: inspirados en pulpos y gusanos, estos robots tienen cuerpos flexibles que les permiten adaptarse a terrenos irregulares y moverse sin estructuras rígidas.
- Sistemas híbridos: combinan materiales dinámicos con sensores avanzados para cambiar su estructura dependiendo del entorno.
Estos avances permiten que los robots bioinspirados sean más eficientes energéticamente, se adapten mejor a entornos complejos y ejecuten tareas con mayor precisión que los robots tradicionales.
¿Qué nos depara el futuro? La optimización evolutiva en robótica
Floreano cree que el siguiente paso en la robótica bioinspirada será el desarrollo de robots que evolucionen y optimicen su diseño de manera autónoma. En lugar de depender de modelos predefinidos, los robots del futuro podrían experimentar con distintas configuraciones físicas y aprender cuáles son las más efectivas. Este enfoque, similar a la evolución biológica, podría dar lugar a nuevas formas de locomoción y manipulación que aún no hemos imaginado.
Sin embargo, este camino presenta desafíos. Aún no existen simuladores suficientemente avanzados para replicar con precisión los comportamientos complejos de los sistemas biológicos. La clave, según Floreano, está en la combinación de experimentos en el mundo real y modelos de inteligencia artificial capaces de interpretar estos datos y generar nuevas soluciones.
¿Hacia un «RobotGPT»? La IA física del futuro
Dario Floreano plantea una pregunta clave: «¿Podemos tener un RobotGPT, una IA capaz de generar comportamientos autónomos en robots, del mismo modo que ChatGPT genera texto?». En teoría, el comportamiento de un robot es una secuencia de comandos motores y sensoriales, estructurados de manera similar a cómo las palabras forman frases con un orden lógico. Sin embargo, la generación de comportamiento autónomo en robots sigue siendo un desafío mucho mayor que la generación de texto.
Modelos de IA en robótica: avances y límites actuales
En los últimos años, ha habido dos avances importantes en este campo:
- Uso de grandes modelos de lenguaje (LLM) para generar programas de control de robots: actualmente, los LLM pueden buscar en internet fragmentos de código existentes y combinarlos para generar comandos de control de drones o brazos robóticos. Por ejemplo, si un usuario indica «vuela hacia el norte», el modelo es capaz de buscar un programa adecuado y adaptarlo. Sin embargo, esta tecnología sigue dependiendo de código preexistente y no genera nuevos comportamientos.
- Vision-Language-Action Models (VLA): un paso adelante, pero aún con limitaciones: Estos modelos combinan procesamiento de imágenes, lenguaje natural y comandos de control. Por ejemplo, si el sistema recibe una imagen de frutas y la orden «coloca la fresa en la taza», el robot traduce ese comando en una secuencia de movimientos y lo ejecuta. Sin embargo, como advierte Floreano, estos modelos no crean nuevas habilidades: simplemente generalizan el uso de habilidades ya programadas en su base de datos.
El gran reto: generar habilidades nuevas en robots
El problema central es que los robots físicos no pueden depender solo de datos preexistentes o simulaciones. Floreano explica que, a diferencia del lenguaje, que es estático y predecible, el mundo físico está lleno de factores dinámicos como la gravedad, la fricción y la resistencia del aire. Por ejemplo, un robot cuadrúpedo no puede ser programado con ecuaciones fijas para todas las situaciones posibles, sino que necesita aprender por ensayo y error en el mundo real.
Aquí es donde entran en juego el aprendizaje por refuerzo y los simuladores avanzados. Hasta hace pocos años, la robótica tenía un gran cuello de botella porque cada aprendizaje requería experimentación física directa. Pero con los nuevos simuladores, como los desarrollados por Marco Hutter en ETH Zurich, los robots pueden entrenarse virtualmente y transferir ese aprendizaje al mundo real. Un ejemplo es el primer dron autónomo que venció a pilotos humanos en carreras, una hazaña lograda gracias a entrenamiento en simulación.
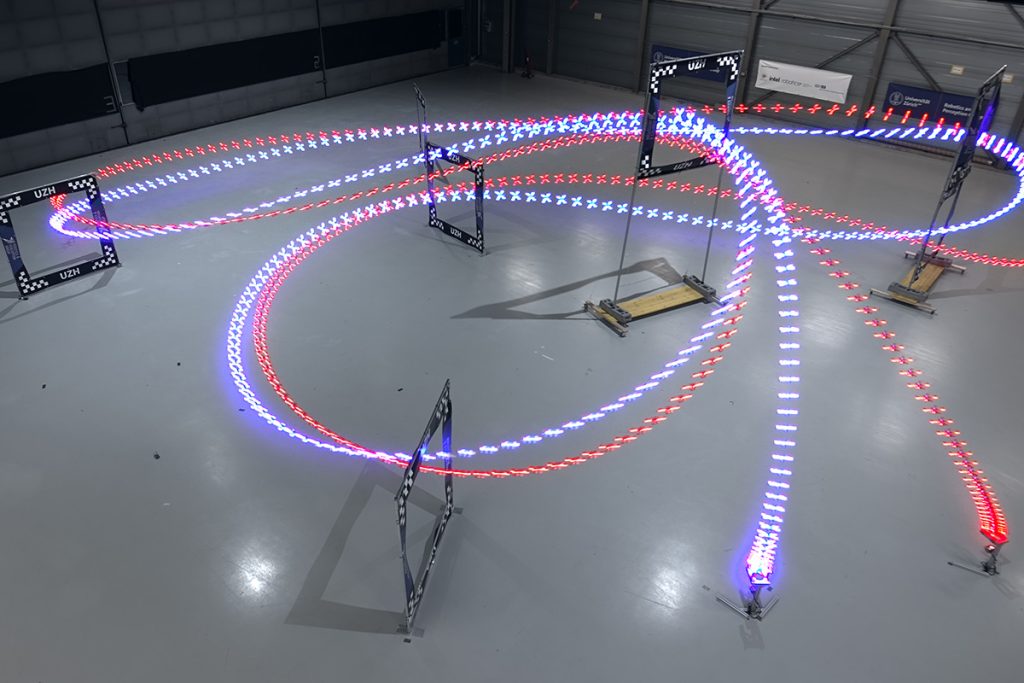
Fuente: Challenge Accepted: High-speed AI Drone Overtakes World-Champion Drone Racers
Un ejemplo que muestra Floreano en su ponencia es el uso de aprendizaje profundo por refuerzo en paralelo masivo, para que un robot aprenda a andar:
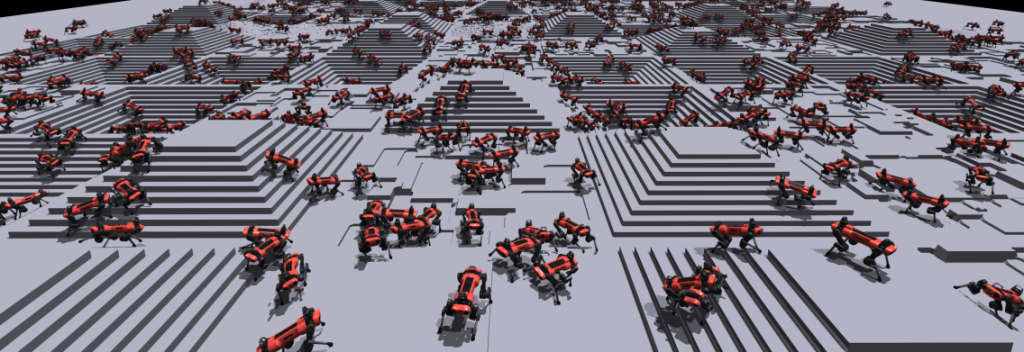
Fuente: Learning to Walk in Minutes Using Massively Parallel Deep Reinforcement Learning
¿Habrá un RobotGPT universal?
Floreano cree que no veremos un único modelo de IA universal para robots. En su lugar, cada tipo de robot tendrá su propia IA especializada:
- VLA Models para brazos robóticos, optimizados en manipulación de objetos.
- Modelos específicos para cuadrúpedos, que aprendan de la biomecánica y la locomoción.
- IA especializada en drones, que combine aerodinámica y sensores avanzados.
El mayor desafío sigue siendo crear una IA que realmente pueda aprender nuevas habilidades sin intervención humana, algo que aún está lejos de lograrse.
Otros artículos de esta serie sobre IA física:
Embodied AI: La inteligencia artificial que sale del mundo digital para habitar el físico por Jeremy Kahn
Embodied AI y el límite de la conciencia: la visión de Antonio Damasio

Fundador de NCCR Robotics